MSc thesis project proposal
Optimal Control of Linear Dynamical Systems with Sparse Inputs
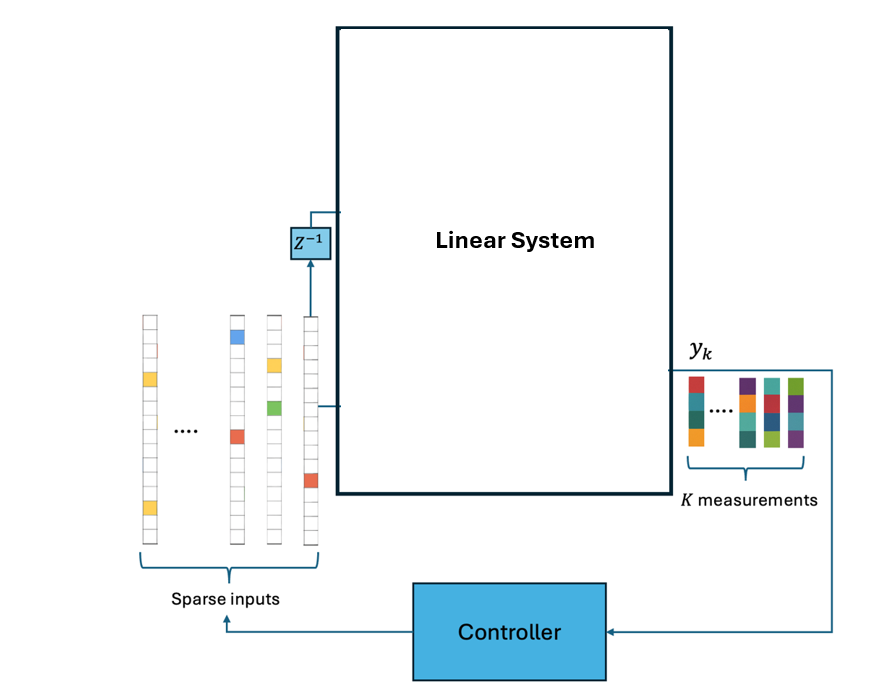
Sparsity is about doing more with less, i.e, using only the necessary options instead of all available ones. This idea is powerful in control design, where sparse control inputs are desirable due to system resource constraints. For example, in many systems, such as robots or power grids, a controller sends commands to actuators (the components that perform actions). Normally, it communicates with all of them at all times, but with sparsity, only a small number of actuators receive commands at any given moment, while the rest remain inactive. As a result, communication and data usage are reduced, saving battery power, bandwidth, and time. In applications such as drones, networks with limited bandwidth, and sensor systems, reducing the number of active signals helps avoid overload and improve efficiency. Sparsity constraints on control inputs naturally arise in other practical areas, including computer vision, seismic signal processing, and cyber-physical systems.
Assignment
The goal of this project is to develop algorithms that intelligently design sparse control signals to maintain good system performance while using as few actuators as possible. In particular, these methods aim to balance performance and efficiency by minimizing the Linear-Quadratic Gaussian (LQG) cost, which accounts for system dynamics, errors, and noise. The project with be jointly supervised by Rupam Chakraborty and Geethu Joseph.
Requirements
For this project, we are looking for a master's student in either electrical engineering or a related field. Furthermore, we are looking for a student who has a background in signal processing, basic statistical techniques, data analysis, and programming skills in Matlab, Python, and/or C/C++. Strong communication (written and verbal) skills in English are mandatory.
Contact
dr. Geethu Joseph
Signal Processing Systems Group
Department of Microelectronics
Last modified: 2026-04-07